


Stepper motors play a crucial role in numerous applications, from industrial machinery to consumer electronics. These motors provide precise control over movement, making them an ideal choice for tasks requiring exact positioning. However, stepper motors cannot function effectively without the proper control system, which is where the stepper motor driver comes in.
In this article, we’ll explore stepper motor drivers in detail, with a special focus on the PoStep60-256 model, one of the most advanced drivers in the market today. We will also discuss how a stepper motor driver works, its importance in regulating motor performance, and the essential wiring processes involved in setting up these drivers. By the end of this guide, you’ll have a solid understanding of how to harness the full potential of stepper motors and ensure optimal performance in your projects. Whether you’re a seasoned engineer or a beginner, this article will provide the insights needed to make informed decisions when working with stepper motor drivers.
The Importance of a Stepper Motor Driver
Stepper motors are known for their precise control, making them a popular choice in applications that require accurate positioning, such as 3D printers, CNC machines, robotics, and more. However, their inherent characteristics, such as the need for controlled stepping and direction, mean that they cannot operate effectively without a stepper motor driver. In this chapter, we will delve into why a stepper motor driver is indispensable for the proper functioning of a stepper motor and how it impacts the performance of your system.
A stepper motor driver is an electronic device that sends electrical pulses to the stepper motor’s coils. These pulses are crucial because they control the rotation of the motor by energizing specific coils in a particular sequence. The driver ensures that the stepper motor moves in a highly controlled manner, allowing for precise steps to be taken. Without this driver, the motor would be unable to move or rotate, as it relies on the electrical signals provided by the driver to initiate movement.
When discussing the importance of a stepper motor driver, one of its primary roles is to manage the motor’s speed and direction. The driver determines how fast the motor turns by adjusting the frequency of the electrical pulses sent to the coils. By varying the speed of these pulses, the driver can make the motor rotate faster or slower. Additionally, the driver also determines the direction of the motor’s movement, controlling whether the motor turns clockwise or counterclockwise. This level of control is essential in applications that require precise positioning and smooth, consistent motion.
Another critical aspect of a stepper motor driver is its ability to control the current flowing through the motor coils. Stepper motors operate by using electromagnets that are energized in a sequence, and the amount of current applied to these coils directly affects the torque and efficiency of the motor. The driver manages the current to ensure that the motor operates at the optimal level without overloading the coils or causing unnecessary heat generation. This feature helps to prolong the lifespan of the motor while also improving its overall performance.
In more advanced systems, stepper motor drivers, like the PoStep60-256, offer additional features such as microstepping, which provides even finer control over the motor’s movement. Microstepping is a technique that divides each full step of the motor into smaller, incremental steps, allowing for smoother operation and reduced vibration. This can be particularly beneficial in systems where noise reduction and precision are critical, such as in 3D printing or high-precision machinery.
Moreover, the stepper motor driver also plays a role in ensuring that the motor receives the correct voltage. Without the appropriate voltage regulation, the motor could either be underpowered or damaged by an excessive current. The driver ensures that the motor operates within the required voltage range, preventing damage and ensuring reliable performance over time.
In conclusion, the stepper motor driver is not just an accessory but a critical component that ensures the stepper motor functions correctly and efficiently. Whether controlling speed, direction, current, or voltage, the driver’s role is to provide precise and reliable operation. In the next chapter, we’ll explore the PoStep60-256, a popular model of stepper motor driver that exemplifies these principles and offers advanced features for high-performance applications.
The PoStep60-256: A Powerful Stepper Motor Driver
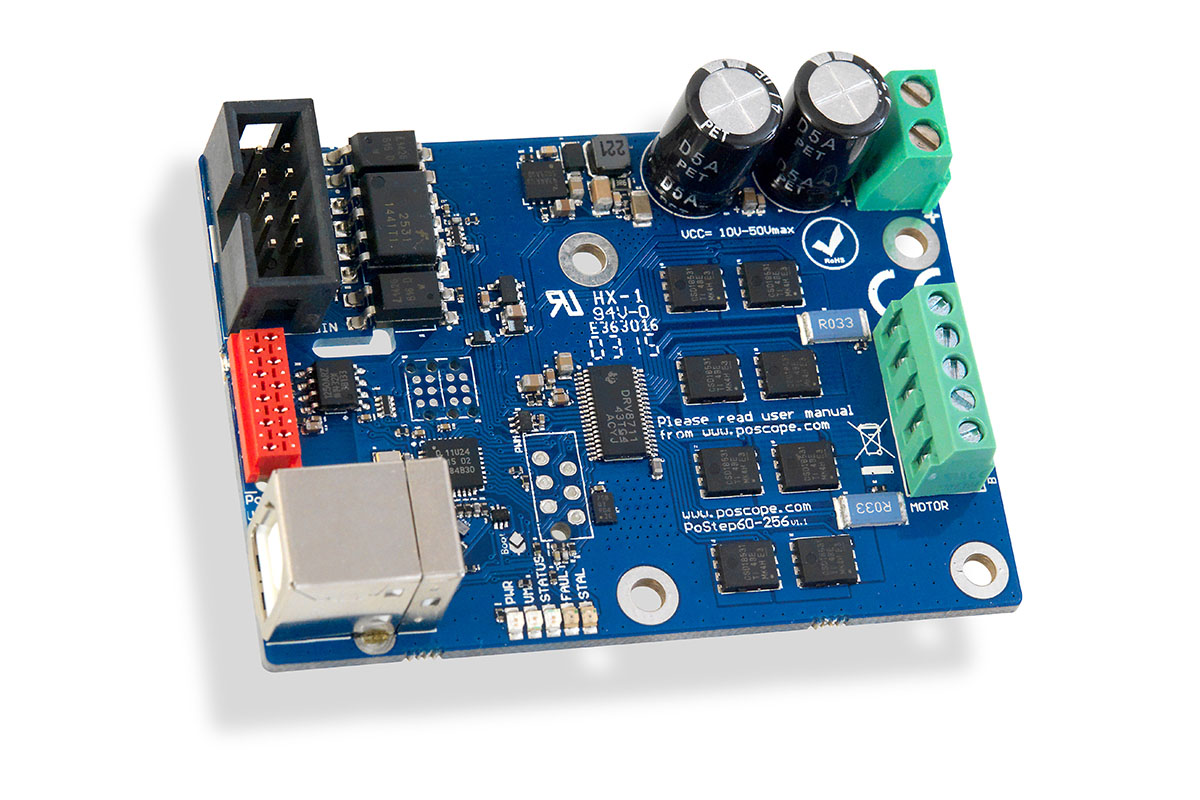
When selecting a stepper motor driver, the choice of model can significantly influence the performance, efficiency, and versatility of your system. Among the numerous drivers available, the PoStep60-256 stands out as a highly capable and advanced stepper motor driver. In this chapter, we will explore the features, advantages, and applications of the PoStep60-256, highlighting why it is considered a top choice for modern stepper motor control.
The PoStep60-256 is designed to provide precise control over stepper motors, particularly in applications that demand high performance and reliability. One of the key features of this driver is its ability to handle high current ratings. With the PoStep60-256, you can drive stepper motors with a current rating of up to 6A per phase, making it ideal for high-torque applications. This allows it to power motors that require substantial current, enabling them to perform under heavy loads without compromising on precision.
A standout feature of the PoStep60-256 is its support for microstepping. As mentioned earlier, microstepping is a technique that divides each step of the motor into smaller increments, resulting in smoother motion and finer positional control. The PoStep60-256 supports microstepping up to 256 steps per full rotation, offering exceptional resolution and minimizing mechanical vibrations. This feature is especially important in applications where smooth operation is crucial, such as in CNC machines, 3D printers, and precision robotics. By enabling microstepping, the PoStep60-256 significantly enhances the performance and quality of the motor’s output.
Additionally, the PoStep60-256 driver is equipped with a built-in current control mechanism that adjusts the current delivered to the motor in real-time. This feature ensures that the motor operates at optimal efficiency by preventing both undercurrent (which can result in insufficient torque) and overcurrent (which can cause overheating or damage to the motor). The driver’s current control system also helps extend the lifespan of both the motor and the driver itself, making it a cost-effective solution for long-term operations.
Another advantage of the PoStep60-256 is its flexibility in terms of input voltage. It can operate across a wide voltage range, typically between 12V to 60V, allowing it to be used with a variety of stepper motors, regardless of the specific voltage requirements. This flexibility makes it an excellent choice for different types of systems and applications, from low-voltage setups to high-power, industrial systems.
The PoStep60-256 also features several protection mechanisms that ensure the driver and motor remain safe during operation. These protections include overcurrent protection, thermal shutdown, short-circuit protection, and under-voltage lockout. These safety features are essential in preventing damage due to electrical faults, ensuring reliable and continuous operation, even under challenging conditions.
In terms of integration, the PoStep60-256 is highly versatile and easy to incorporate into different systems. It offers simple communication options such as step and direction control, as well as more advanced interfaces like SPI (Serial Peripheral Interface), which makes it easier to connect with a microcontroller or other control units. This versatility allows engineers and hobbyists to integrate the driver into various control systems, from basic setups to more complex, multi-axis machines.
In conclusion, the PoStep60-256 stepper motor driver offers a blend of power, precision, and flexibility, making it a go-to choice for a variety of applications. Whether it’s for high-performance CNC machines, robotics, or 3D printing, the PoStep60-256 delivers exceptional results with its high current capacity, microstepping support, and robust protection features. As we move on to the next chapter, we will delve deeper into understanding how stepper motor drivers, like the PoStep60-256, function and how they control the operation of stepper motors.
How Does a Stepper Motor Driver Work?
Understanding how a stepper motor driver works is key to unlocking its potential in various applications. While stepper motors are known for their precise control over movement, they rely heavily on the stepper motor driver to function properly. In this chapter, we’ll break down the core principles behind stepper motor drivers and explain how they work to provide the accuracy and reliability that stepper motors are known for.
A stepper motor driver essentially acts as the intermediary between a microcontroller or controller system and the stepper motor itself. The microcontroller sends control signals to the driver, which then processes these signals and generates the necessary electrical pulses to drive the stepper motor’s coils. These pulses are the heart of the stepper motor’s operation and dictate how the motor turns. The stepper motor driver controls the timing, sequence, and amount of current sent to the motor’s coils to ensure that the motor turns with the required precision.
The core principle behind how a stepper motor driver works lies in the concept of electromagnetic fields. Stepper motors contain multiple coils (also called windings) that are energized in a specific sequence to create a rotating magnetic field. When a coil is energized, it creates an electromagnetic field that attracts or repels the permanent magnets on the rotor of the motor. By energizing the coils in a sequence, the stepper motor driver ensures that the rotor turns in precise, incremental steps.
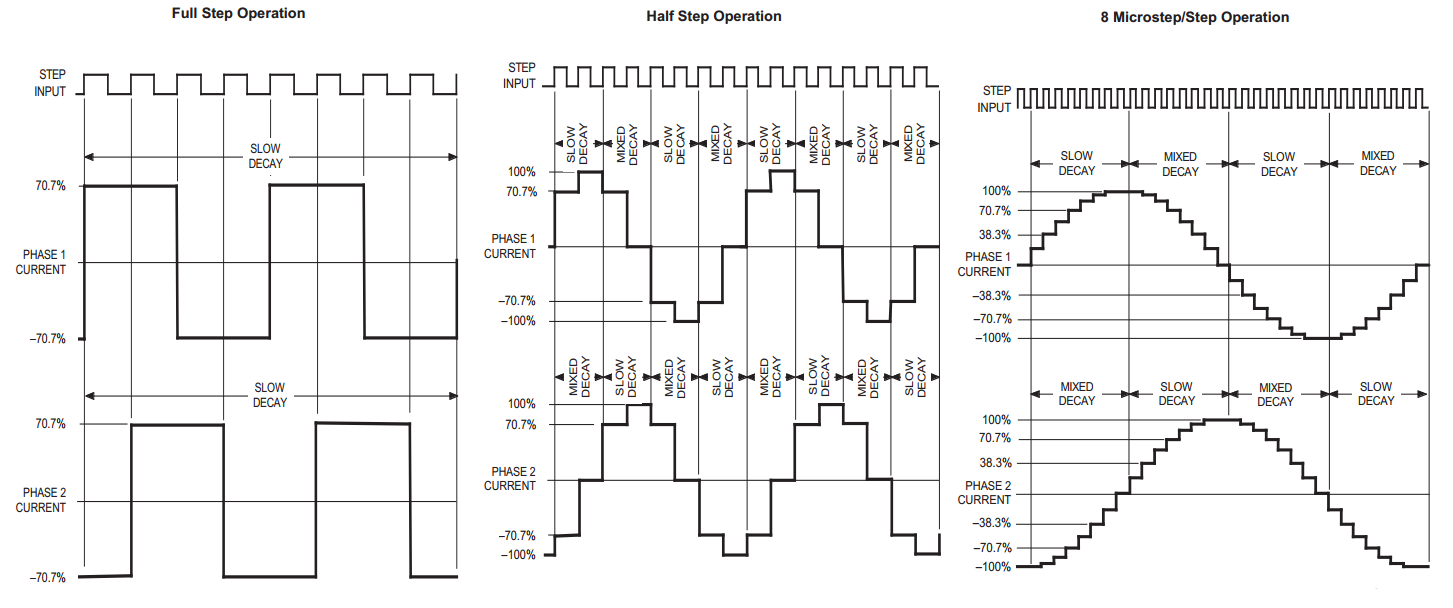
The sequence of coil energizing is crucial for stepper motor operation. A stepper motor driver can control this sequence in several different ways, but the most common method is the full-step mode. In full-step mode, the driver energizes one coil at a time, making the motor rotate by one full step for each pulse received. However, more advanced drivers, such as the PoStep60-256, offer the ability to use microstepping, which divides each full step into smaller steps, providing smoother and more precise control over the motor’s movement. This finer control can be particularly beneficial in applications where reduced vibration, noise, and smoother motion are essential.
The stepper motor driver not only controls the sequence of the pulses but also the current supplied to the coils. The amount of current determines how much torque the motor can generate. By adjusting the current, the driver can control the torque, speed, and performance of the motor. In fact, the driver’s ability to regulate the current is one of the key factors that determines the motor’s efficiency and longevity. Too much current can cause the motor to overheat or even damage it, while too little current can result in insufficient torque and unreliable operation.
In addition to controlling the timing and current, the stepper motor driver also handles the direction of the motor’s movement. This is typically achieved by switching the energizing sequence of the coils. For example, in a unipolar stepper motor, reversing the sequence of pulses will reverse the magnetic field and cause the motor to rotate in the opposite direction. The driver manages this sequencing process, ensuring the motor turns the desired way when instructed.
Modern stepper motor drivers, like the PoStep60-256, also provide additional features that enhance their functionality. For example, many drivers offer fault detection mechanisms to protect both the motor and the driver. These systems can detect issues such as short circuits, overheating, or overcurrent conditions, and they can automatically shut down or adjust the operation to prevent damage.
One of the most important aspects of how a stepper motor driver works is its ability to interface with external control systems. For instance, the PoStep60-256 is compatible with several communication protocols, including step/direction control and more advanced interfaces like SPI. This flexibility allows users to integrate the driver into a wide variety of systems, from simple microcontroller-based setups to complex automation systems.
In summary, the stepper motor driver works by converting control signals into electrical pulses that energize the motor’s coils in a precise sequence. By controlling the timing, current, and direction of these pulses, the driver ensures that the stepper motor operates smoothly and with high accuracy. The driver is also responsible for managing the motor’s torque, speed, and efficiency, making it an essential component in any system that relies on stepper motors. In the next chapter, we’ll take a closer look at the wiring process involved in connecting a stepper motor driver to the motor, ensuring proper communication and optimal performance.
Stepper Motor Driver Wiring: Essential Connections and Setup
Wiring a stepper motor driver correctly is crucial for ensuring the motor operates efficiently and safely. Improper wiring can lead to poor performance, overheating, or even damage to the driver or motor. In this chapter, we will walk through the fundamental wiring concepts involved in connecting a stepper motor driver, like the PoStep60-256, to a stepper motor and how to set up the system for optimal performance.
Understanding the Wiring Components
Before diving into the actual wiring process, it’s important to understand the key components involved in setting up a stepper motor driver system:
Stepper Motor: This is the motor that you will control using the stepper motor driver. Stepper motors typically have multiple coils that need to be wired to the driver.
Stepper Motor Driver: The driver is the central unit responsible for controlling the movement of the stepper motor. The PoStep60-256 driver, for instance, is capable of driving motors with up to 6A of current per phase, offering a high level of control.
Power Supply: The power supply provides the necessary voltage and current to both the stepper motor driver and the motor itself. Ensure that the voltage rating of the power supply is appropriate for the stepper motor and driver.
Microcontroller or Controller: A microcontroller (such as an Arduino or Raspberry Pi) is used to send control signals to the driver. This can include step and direction pulses, or more advanced communication protocols like SPI.
Wiring the Stepper Motor to the Driver
The first step in setting up the stepper motor driver wiring is to connect the stepper motor to the stepper motor driver. Most stepper motors, especially bipolar motors, have two coils that must be connected to the corresponding terminals on the driver. These coils are typically labeled as A, A’, B, and B’ (for a bipolar motor), or as A+, A-, B+, and B- (for unipolar motors).
For a PoStep60-256 driver, the wiring will follow these general steps:
Identify the coil pairs: First, you need to identify the two pairs of coils on the stepper motor. Each pair of coils will be connected to one of the motor’s terminals. For bipolar motors, this will mean connecting the two wires from each coil to the corresponding motor outputs on the driver. For unipolar motors, the motor’s center tap wires (usually four total) will also be connected to the driver.
Connect the coils: Connect the two wires from each coil to the driver’s corresponding output terminals. For instance, coil A should be connected to the driver’s terminal labeled A, and coil B should be connected to the terminal labeled B.
Wiring the Power Supply
The power supply is another critical component in the system. The PoStep60-256 driver requires an external power supply to provide the voltage necessary to drive the stepper motor. The voltage range typically spans from 12V to 60V, depending on the specifications of your stepper motor and driver.
Here’s how to connect the power supply:
Power supply voltage: Ensure that your power supply’s voltage matches the requirements of both the stepper motor and driver. For instance, if your motor requires a 24V supply, you should use a power supply with an output within that range.
Connect power supply to driver: The PoStep60-256 has dedicated power input terminals (often labeled VCC or V+) and ground (GND). Connect the positive terminal of the power supply to the VCC input on the driver and the negative terminal to the GND input. Be sure to check the wiring diagram for your specific driver to avoid connecting the wrong terminals.
Current rating: Make sure the power supply can provide enough current for both the stepper motor and the driver. If the supply doesn’t provide sufficient current, the system may not operate correctly, and components could overheat.
Wiring the Controller (Microcontroller)
Next, you will need to connect the stepper motor driver to the controller (e.g., an Arduino or Raspberry Pi) that will send the control signals. The controller communicates with the stepper motor driver using a series of electrical pulses, typically step and direction pulses. For advanced drivers like the PoStep60-256, there may be additional control protocols like SPI.
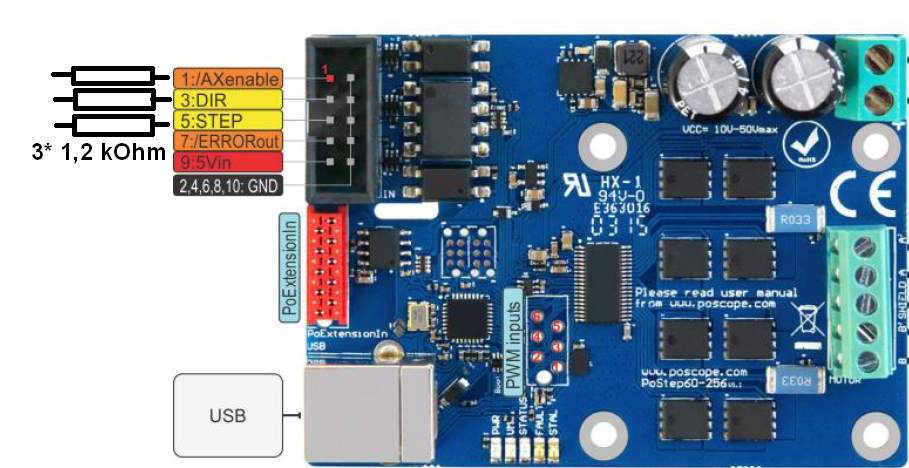
Step and Direction Pins: The basic setup for control involves wiring the step and direction pins from the microcontroller to the corresponding input pins on the PoStep60-256 driver. These pins allow the controller to dictate the movement of the motor. The step pin sends a pulse every time the motor should take a step, and the direction pin indicates which direction the motor should rotate.
Additional Pins for Advanced Control: The PoStep60-256 may also support other inputs for more advanced control features, such as enabling or disabling the driver, setting the microstepping resolution, or controlling current limits. These pins should also be connected if you wish to use these features.
Power the Controller: Lastly, ensure that your microcontroller is properly powered. Many microcontrollers, like the Arduino, have their own onboard power regulation, but you should check that the controller is receiving sufficient power from its own supply.
Double-Check the Connections and Test the System
Before powering up the system, it’s important to double-check all the connections. Ensure that the stepper motor’s coils are correctly wired to the driver, that the power supply is connected to the right terminals, and that the control signals are properly routed from the microcontroller to the driver.
Once everything is connected, you can begin testing the system. Start by sending a simple signal from the controller to make the motor move in one direction. Observe the motor’s movement to confirm that it is rotating as expected. If using microstepping, ensure that the motor runs smoothly and quietly.
Correct wiring is the backbone of any stepper motor driver setup. By carefully connecting the stepper motor, power supply, and microcontroller to the stepper motor driver, you ensure that the system operates as intended. Whether using the PoStep60-256 or another driver, proper wiring guarantees reliable performance, smooth operation, and safety for both the motor and driver. With the wiring complete, you’re now ready to take full control of your stepper motor, whether for 3D printing, robotics, or any other application requiring precise motion control.
Conclusion
Stepper motors are indispensable in applications requiring high precision and controlled movement, from robotics to 3D printing. However, their effectiveness is reliant on a well-designed and properly implemented stepper motor driver. In this article, we’ve explored the crucial role that a stepper motor driver plays in the successful operation of stepper motors. Specifically, we’ve highlighted the PoStep60-256, a powerful driver offering advanced features such as microstepping and current control, enabling more precise motion and enhanced system efficiency.
We also delved into the inner workings of a stepper motor driver, illustrating how it controls the timing, sequence, and current supplied to the motor, ensuring accurate steps and smooth motion. Understanding the electrical signals and mechanisms involved in this process is key to harnessing the full potential of stepper motors.
The wiring process, often a source of confusion for many, is another critical component in setting up a stepper motor system. Properly connecting the stepper motor driver to both the motor and the power supply ensures safe and optimal operation. With careful attention to detail, you can integrate the driver with your controller and power source, setting up a robust and reliable system that meets the demands of any project.
In conclusion, mastering the stepper motor driver, such as the PoStep60-256, and understanding how to wire it correctly is essential for anyone working with stepper motors. Whether you’re designing a complex automated system or simply exploring motion control for the first time, the knowledge gained from this article will empower you to use stepper motors with confidence and precision, making your projects more efficient, reliable, and effective.